 Action Table
Action Table
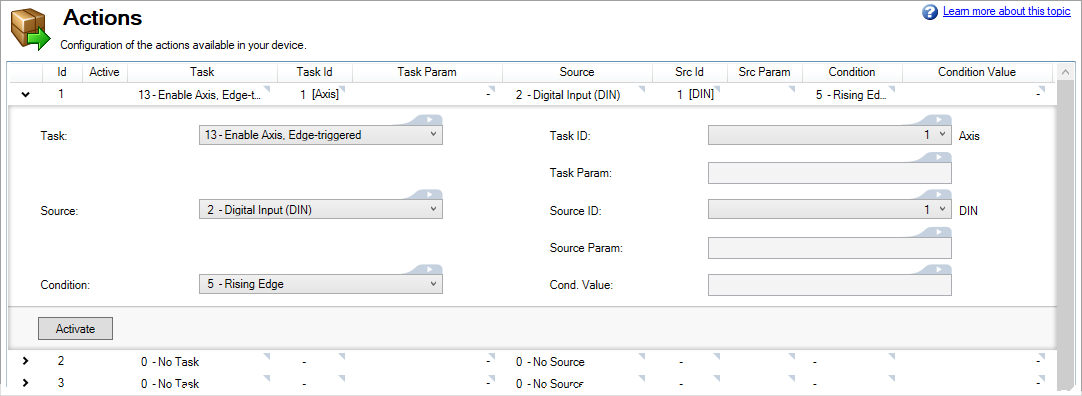
Use the Actions view to setup tasks for the drive to perform based on selected sources and conditions. Up to 32 actions can be configured. Each action, at a minimum, has three elements, each of which may have additional requirements.
For example, Action 1 below will attempt to Enable Axis 1 any time it sees a rising edge![]() A rising edge is the transition of a digital signal from low to high. It is also called positive edge on Digital Input 1. This action also has a Source ID setting which digital input to react on, and a Task ID setting which axis to enable.
A rising edge is the transition of a digital signal from low to high. It is also called positive edge on Digital Input 1. This action also has a Source ID setting which digital input to react on, and a Task ID setting which axis to enable.
Action Execution
Actions are executed sequentially, top to bottom, starting at Action 1, at a 4kHz rate.
Certain tasks, like clearing faults, may take a longer than 4kHz cycle to execute. These tasks will be initiated in a low priority thread. If the task is triggered a second time while the task is already running, it will not be queued to run again, and the action will be ignored until the running task is complete.
Scanning of the table does not begin until boot up has completed. Any edges which occur on any signal will be ignored until this time. In addition, edge triggered actions will not be executed if the test condition is already true at boot time.
To avoid inconsistent behavior, an action will automatically be disabled when any of its fields are edited. Reactivate the action after editing any of its field settings.
Chaining Actions
Actions are executed sequentially, so they can be configured to execute a chain of actions.
For example, if Action 1 enables axis 1 when mains ready is true, then Action 2 can be configured to start homing when axis 1 is enabled. When Action 1 completes its task, it will trigger Action 2 to execute as well.

Reference
| Element | Description | Parameter | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Task |
An action task defines the drive function to execute when the source's condition is met. Some tasks will execute a drive function when the condition becomes true. Other tasks will execute every cycle and use the condition or source to set a drive value.
|
ACTION#.TASK | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Task ID | Some tasks require the Task ID to specify what is acted upon, such as setting a DOUT value. | ACTION#.TASKID | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Task Param. |
Some tasks require task parameters to further specify what is acted on. For example, if the task is Motion Task, Edge-triggered the task parameter field will appear. Setting this field to 5 specifies that the action will start motion task 5 on the selected axis.
|
ACTION#.TASKPARAM | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Source |
The action source is the input the drive reacts on.
|
ACTION#.SOURCE | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Source ID | Some action sources require a specific Source ID number, such as a DIN value. | ACTION#.SOURCEID | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Source Param. |
Some sources require source parameters to further specify what is acted on. For example, if the source is Move Complete, the source parameter field will become editable. Setting this field to 8 specifies that the action will consider Move Complete for motion task 8 on the selected axis.
|
To Add | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Condition |
A condition value is required when the condition performs a comparison. For example, if the action source is set to Analog Input, and the condition is set to "Falls Below Threshold", a condition value will define the threshold. If the condition value is set to 4.5, the action will check if the analog input transitions from a value greater than 4.5 volts to a value less than 4.5 volts.
|
ACTION#.CONDITION | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Condition Value | Defines the value used by the Condition to test against the Source. | ACTION#.CONDITIONVALUE |










